重规范化
由于数值误差的存在,方向余弦矩阵不再满足正交性,即式(5)右端不再严格等于单位矩阵。事实上,此时坐标系不再描述一个刚体。幸运的是,数值误差积累地非常缓慢,所以及时修正误差不是一件困难的事情。
我们把使方向余弦矩阵满足正交性的操作称为重规范化。有很多种方法可以实现重规范化操作。仿真结果显示它们的效果都比较好,这里给出最简单的一种方法,操作流程如下:
首先计算方向余弦矩阵X轴与Y轴的内积,如果矩阵严格正交,那么这个结果应该是0,所以这个结果实际上反映了X轴与Y轴相互旋转靠近的程度。
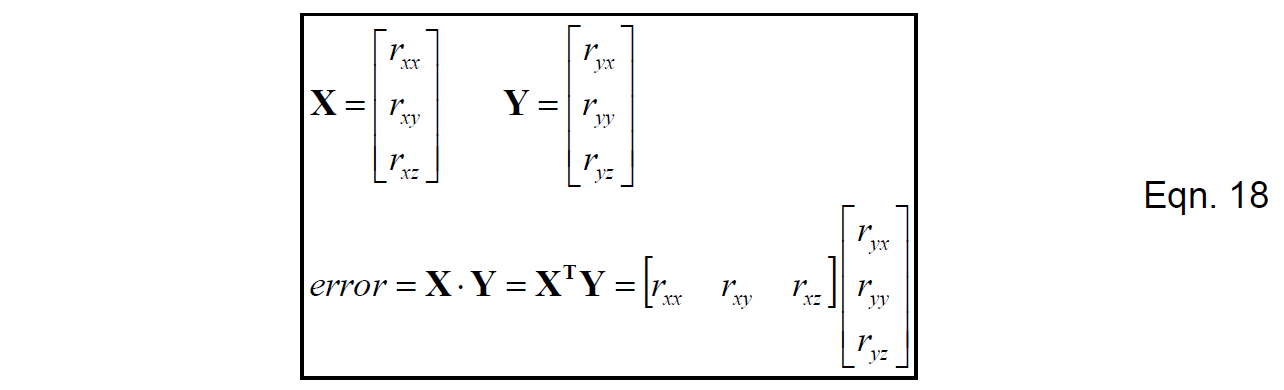
把误差均分给X轴与Y轴,并近似地将X轴与Y轴分别向相反的方向转动,在此X轴与Y轴互相修正,具体操作如下:
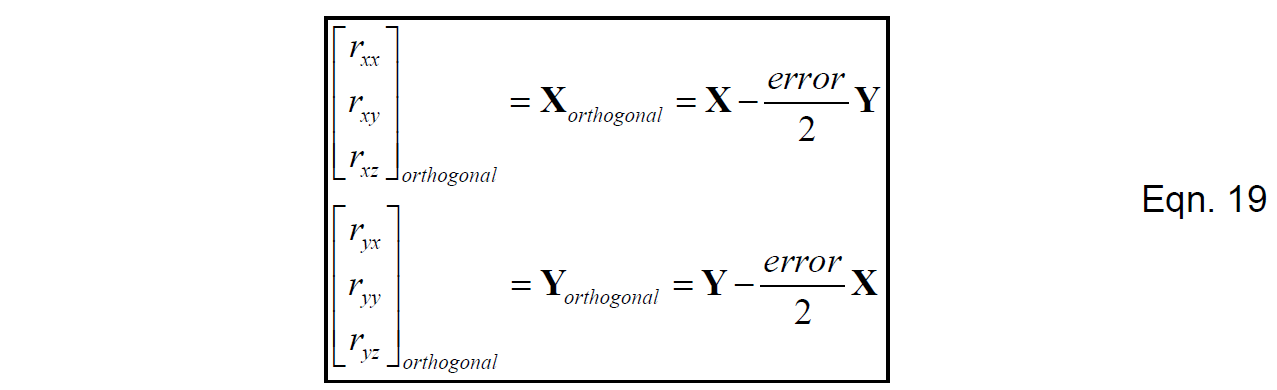
可以验证,将式(19)代入式(18)后,正交性误差逐渐减小。验证过程中可能需要用到方向余弦矩阵行列均为单位向量这一条件。相比于将误差完全分给X轴或Y轴其中一个,将误差均为能够在修正后得到更小的误差。
下一步是调整方向余弦矩阵的Z轴,使得它与X轴和Y轴均正交。这里我们采用的方法是简单地重新计算Z轴,使其等于X轴与Y轴的外积。

最后一步是调整方向余弦矩阵每一行的大小使其等于1。一种方法是对每一行的每个元素,除以该行元素平方和的二次方根。然而,有一种更容易的方法是,鉴于每一行的大小不会与1相差太远,可以采用泰勒展开。计算方法如下所示:
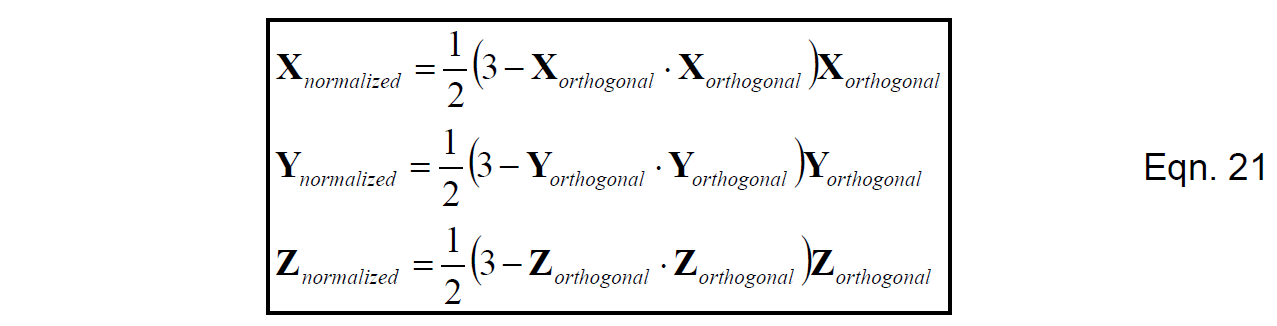
式(21)所描述的是将每行向量归一化的操作:用3减去该行向量与自身的内积(该行元素平方和),然后乘以1/2,最后将结果乘到该行所有元素上。
采用此种方法进行归一化的好处是,既没有采用更多的乘法和加法,同时也完全移除了除法与平方根运算。在每一步积分都执行上述重规范化操作,执行周期为0.02s。